
swish!
Research & Development
In 2008, the ShotBot team began a series of research subprojects. The first of these was determining what existing patents are similar to our project. We found 3; a table tennis serving machine, a soccer ball launcher for a goalie to defend on, and a toy basketball launcher. We determined that our project would be worthy of its own patent, in addition to learning what worked for the similar patents. Next, we did research on different types of mechanisms, such as pitching machines. Most used one or two rotating wheels to launch the ball.
We also researched springs and bungees. It was determined that the spring constant for rubber bungee cords is variable. It decreases as the cord is stretched. Around the same time, Nick Craven, team leader, developed a working model, known as Prototype 1, which can be seen in the Products section, using the K'nex platform.
Bungee spring research:

We then calculated the launch angle and velocity necessary to make a basketball into the hoop from 20 ft away, with a hoop entry angle of 60 degrees to the horizontal. In order to put Prototype 1 into a MATLAB simulation, we made dynamic and kinematic equations and then wrote the program. We then drew in SolidWorks our original design based on Prototype 1, shown below.
In 2009, the group decided to change the design to something different than Prototype 1. It would be a compression spring launcher, where the ball is in close contact with the compression springs. Research then began on compression springs, and the forces associated. It was then determined that our original concept was better suited for this project, and we reverted back to Prototype 1.
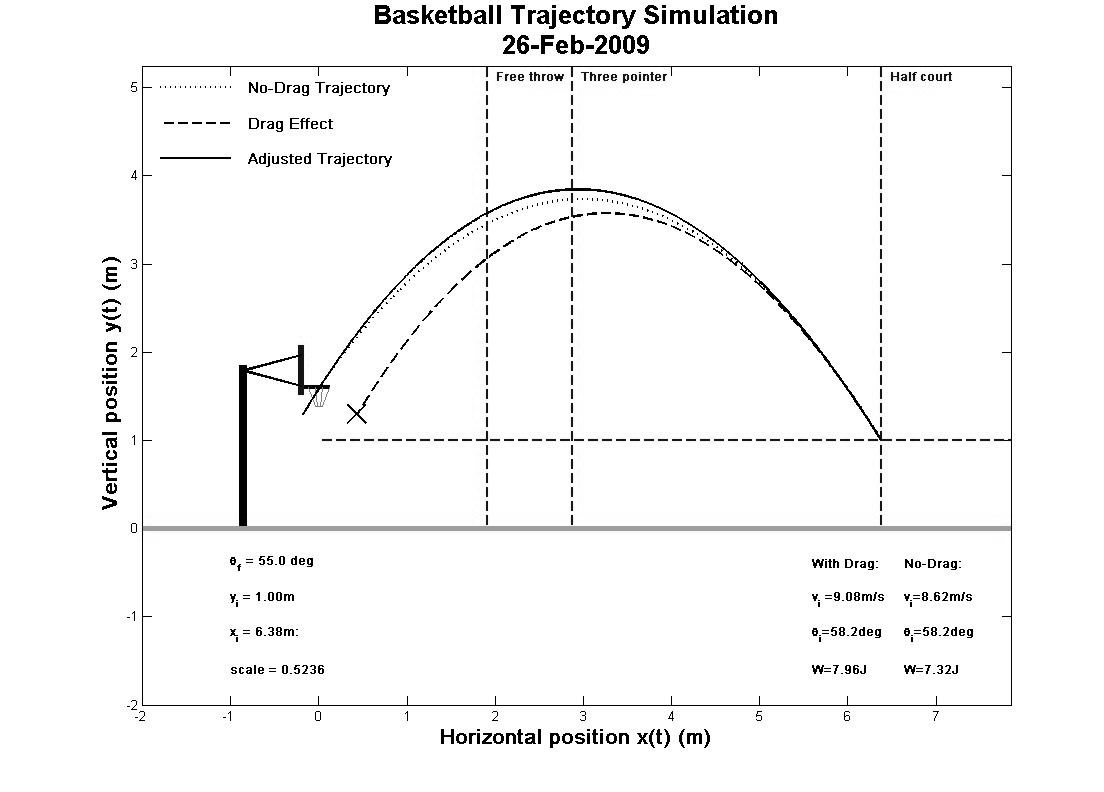
In mid February, the chosen design changed back to the original concept of the quick return tension spring design. Nicolas Krumenacker made a MATLAB analysis of the projectile motion of a basketball launched from our robot from the free point line, three point line, and half court. He modified the simulation to a scaled version with a mini basketball as the scale factor. Below you will see the scaled simulation for the half court shot, which shows the effects of drag and the necessary adjusted values for initial velocity and angle.
Nick Craven improved the MATLAB analysis of the robot system, making it possible to input the initial launch angle and velocity (determined from Nicolas's MATLAB above) and find the spring tension necessary to achieve this launch. This is shown below.
In March, Stephen Augustyn made an analysis that takes an input of the spring tension (as determined by Nick's part above) and determines the stress in the triangular support members of the base. This analysis will be implemented into Nick's MATLAB code so that it can find the stress in the members at all positions of the arm, which makes evident the maximum stresses so that it can be determined if additional supports are needed.
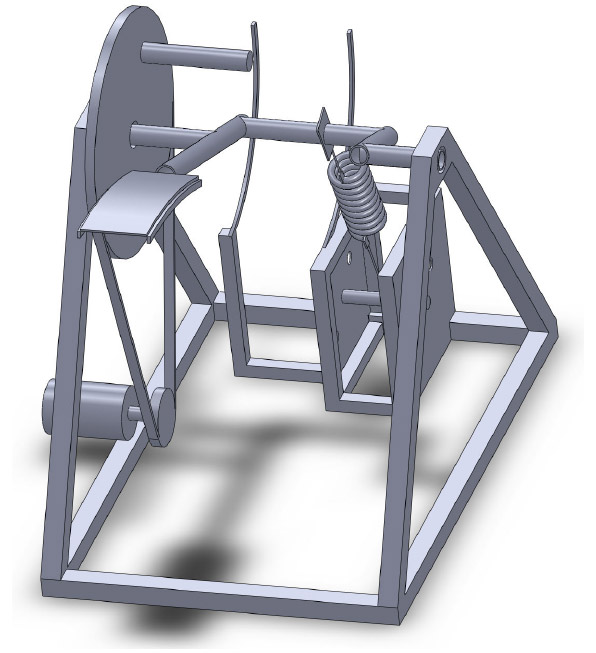
Nick Craven then made a construction minded SolidWorks drawing of the robot, as pictured below. The base will be made of 2 x 4s and the arm of steel pipe.

Poll
Would you like to see the ShotBot at your venue's halftime show?
Definitely! (12)
![]()
Not really (2)
![]()
Definitely not (3)
![]()
I'd be scared to be near it (4)
![]()
Total votes: 24